Tehnologia care permite controlul protezelor bionice folosind impulsurile creierului există de mult timp. Dar tehnologiile existente au anumite dezavantaje. Ele nu pot oferi efectul de feedback cinetic care să permită utilizatorului să simtă „efectul prezenței” mâinii. De exemplu, pentru a efectua orice acțiune, trebuie să se uite la mână, deoarece nu poate fi simțită. Cu toate acestea, datorită introducerii unei interfețe neuronale care generează feedback, a fost posibil să se obțină efectul dorit.
Pentru a realiza „efectul de prezență”, a fost creată o interfață bidirecțională care transmite vibrația la terminațiile nervoase de la locurile de reinervare (locurile în care nervii amputați au fost redirecționați către mușchii rămași). Datorită acestei decizii, creierul începe să „simtă” membrul.
Citeste si: A fost dezvoltată o nouă tehnologie pentru predarea roboților prin dezvoltarea abilităților motorii
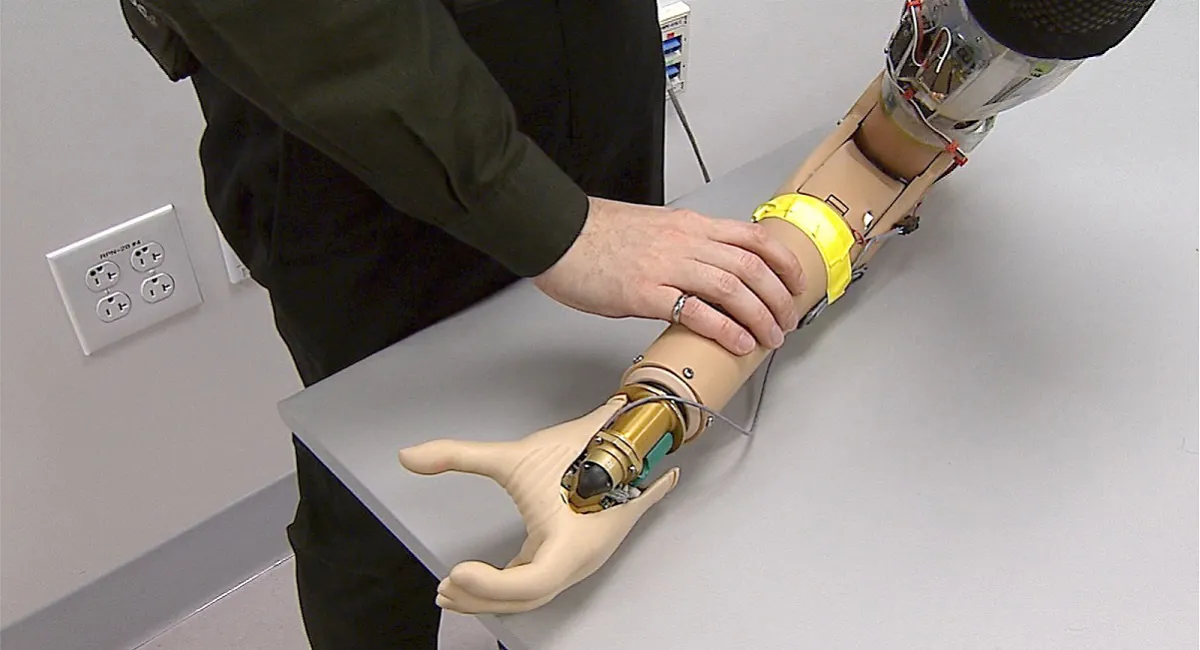
Oamenii care au testat tehnologia au efectuat sarcinile fără să se uite la proteze și uneori au făcut-o la fel de priceput ca cu o mână reală. Cel mai important, membrele protetice se simt reale, nu ca un dispozitiv electronic atașat la corp.
Crearea feedback-ului nu este o tehnologie foarte complexă. Cercetătorii intenționează să o îmbunătățească prin dezvoltarea de semnale mai precise pentru a îmbunătăți „efectul de prezență”. Tehnologia nu trebuie să ofere conexiuni perfecte pentru a fi eficientă. Este suficient pentru a reproduce senzațiile pe care le oferă o mână adevărată. Este de așteptat ca datorită unor astfel de inovații, persoanele cu membre amputate să poată stăpâni cu ușurință o proteză bionică.
Citeste si: Robotul segway Loomo s-a „aprins” pe site-ul de crowdfunding indiegogo
Dzherelo: engadget.com

Lasă un comentariu